服务信息
-
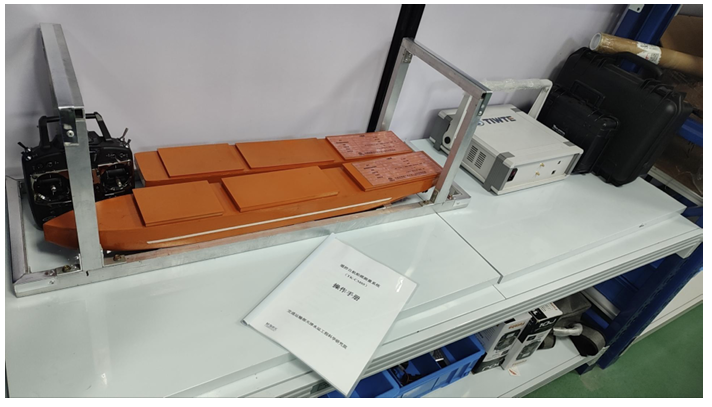
1)自航船模满足《水运工程模型试验技术规范》要求的几何相似、运动相似以及操纵性相似等条件;
2)遥控自航船模航行速度为0-50cm/s,持续航行最大时间可达90分钟;持续航行最大距离可达2000米;
3)测量系统可自动采集船模位置、位姿;
4)可自动采集舵角数据信息;
5)自动计算船模速度,航向角、漂角,漂距等数据;
6)舵角误差 0.1度;速度误差 4%;漂角误差 0.1度,模型位置误差 5mm。
7)对应500T和1000T标准船型的两套(1:100的比例)船模。 -
遥控自航船模测量系统是一种集成了导航控制、数据采集和环境模拟功能的高精度试验设备,主要用于船舶水动力性能研究、航道模拟测试和海洋工程验证。
-
遥控自航船模测量系统是一种高精度、智能化的水文、海洋及水利工程测量解决方案,结合无人船(USV)、多传感器集成和自主导航技术,适用于复杂水域的流速、水深、水质等参数测量。
-
1.需求分析:明确测量目标(如流量、地形或水质)、环境条件(流速、水深)。
2.方案设计:选择船模型号、传感器组合及航行路径(网格/断面模式)。
3.现场实施:
基准站架设(RTK校正)。
船模调试与试航(验证稳定性)。
数据采集(实时监控质量)。
4.数据处理:剔除异常值,生成标准格式报告。
5.成果交付:7-15个工作日内提供最终报告(含原始数据)。 -
面议
联系方式
登录用户才能看到联络人信息和联络方式,请登录

 预约
预约